キーワード
分散システム、分散アルゴリズム、ビザンチン故障、合意、ブロックチェーン、自律移動エンティティ、セキュリティ、ネットワーク、分散処理、機械学習
分散システムは、ネットワークで接続された複数のノードから構成され、ノード同士がお互いに通信し協調することで、一つのタスクをこなします。分散システムには多くのノードが存在することから、一部のノードの故障は避けられません。また,ネットワークの通信遅延から最新の情報を得られないこともあります。私たちが日常で利用する多くの情報サービスは分散システムとして構築されていますが、システムの実現にはこのような難しさがあります。分散システム研究室では、様々なアプリケーションを対象に、これらの問題を解決できる効率の良い分散システムの実現を目指します。
Byzantine Fault Tolerance
分散システムを構成するノードが故障すると、予期しない動作をすることがあります。また、悪意ある攻撃者にノードが乗っ取られた場合には、全体の処理を破綻させるように他のノードを妨害するかもしれません。このような振る舞いは、分散システムの分野ではビザンチン故障としてモデル化されます。Byzantine Fault Toleranceは、たとえ一部のノードがビザンチン故障しても、分散システム全体は故障の影響を受けずにサービス提供を継続できるレプリケーション技術として知られ、ブロックチェーン(分散台帳)や分散データベースのコア技術として広く利用されています。本研究室では、パブリッククラウドを活用し、世界を跨いで構成される地理的分散Byzantine Fault Toleranceの実用化を目指して、コンセンサスアルゴリズムを始めとする様々な技術の研究開発に取り組んでいます。
機械学習によるネットワーク侵入検知システム
ネットワークを経由したサーバへの不正侵入攻撃は年々増加しています。そのような攻撃を検知・遮断するための仕組みとして、ネットワーク型侵入検知システム(NIDS)が広く使われています。ところが多くのシステムはパターンファイルによって攻撃を検知するため、新しい種類の攻撃には対応できません。この問題を解決するため、機械学習を利用した侵入検知システムの研究が進んでいます。本研究室では、機械学習を利用した侵入検知システムを実現するための分散処理フレームワークMLNIDSを提案しました。このフレームワークの実用性について、検知率や処理性能、長期運用の安定性など、様々な観点から検証・改善していきます。
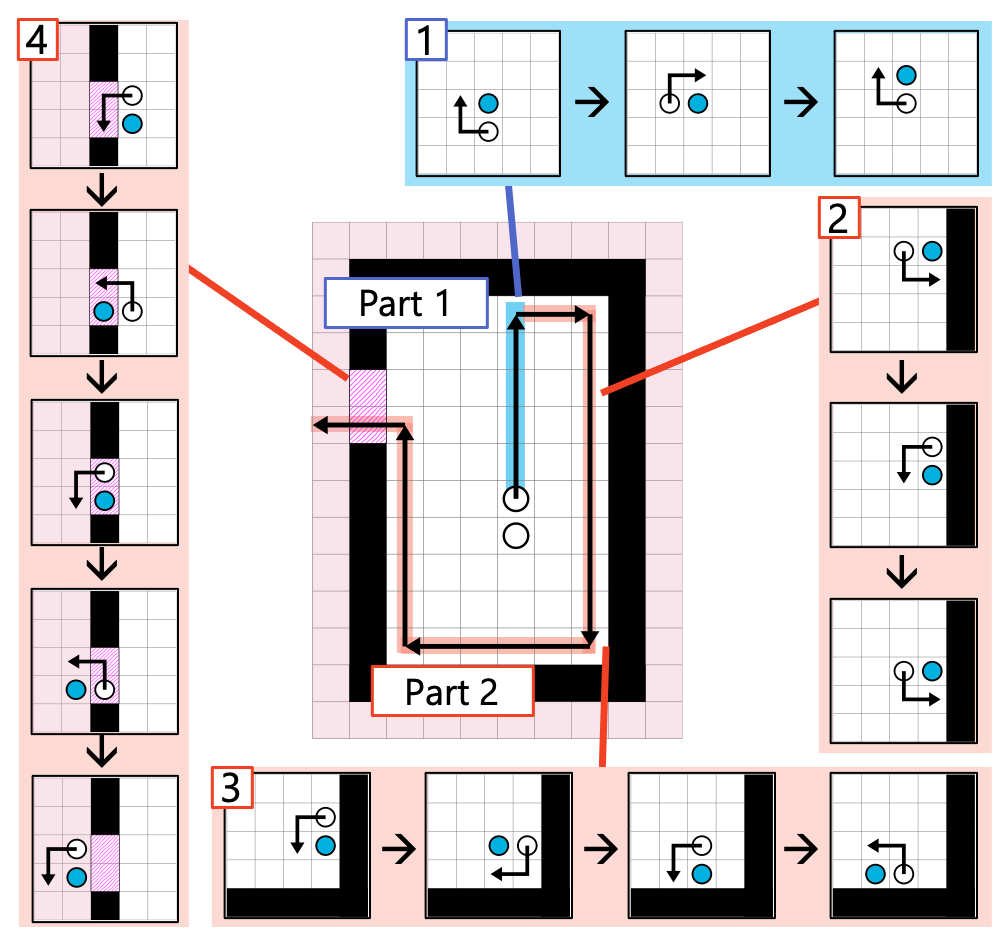
自律移動ロボットの協調動作の理論的解析
新しい分散システムの実現形態として、自律的に環境を移動して情報収集する移動ロボットが注目を集めています。個々の自律移動ロボットは周囲にいるロボットの位置が分かるなどの限られた機能しか持ちませんが、複数のロボットがそれぞれ集めた情報を持ち寄って協調することで、高度なタスクを達成できます。本研究室では、理論計算機科学の観点から、タスクを達成するために必要となるロボットの機能や時間複雑度を明らかにすることを目指します。ロボットのモデルは、メモリや通信機能の有無や、フィールドの定義(連続・離散平面)などの違いから、様々なバリエーションがあります。